ROS
Основная документация: https://wiki.ros.org.
ROS – это широко используемый фреймворк для создания сложных, распределенных робототехнических систем. На ROS основана программная платформа Technic.
![]()
Установка
ROS уже установлен на образе для OPi для Technic.
Для установки инструментов ROS на компьютере вы можете обратиться к официальной документации по установке. Для быстрого старта рекомендуется воспользоваться образом виртуальной машины с ROS и симулятором Technic.
Концепции
Ноды
Основная статья: https://wiki.ros.org/Nodes.
ROS-ноды: основные принципы

ROS-нода представляет собой исполняемую программу, разработанную обычно на Python или C++, которая взаимодействует с другими компонентами системы через ROS-топики и ROS-сервисы. Такой модульный подход к построению робототехнических систем обеспечивает существенные преимущества: снижение связанности компонентов, повышение уровня повторного использования кода и увеличение общей надежности системы.
Большинство современных робототехнических библиотек и драйверов устройств реализованы в формате ROS-нод.
Создание ROS-ноды
Для преобразования стандартной программы в ROS-ноду необходимо:
Подключить специализированную библиотеку
rospy(для Python) илиroscpp(для C++)Добавить соответствующий инициализирующий код для интеграции с ROS-мастером.
Пример ROS-ноды на языке Python:
import rospy
rospy.init_node('my_ros_node') # имя ROS-ноды
rospy.spin() # входим в бесконечный цикл...
Подсказка Любая программа для автономного полета Technic является ROS-нодой.
Топики
Основная статья: https://wiki.ros.org/Topics.
Топики в ROS: механизм обмена данными
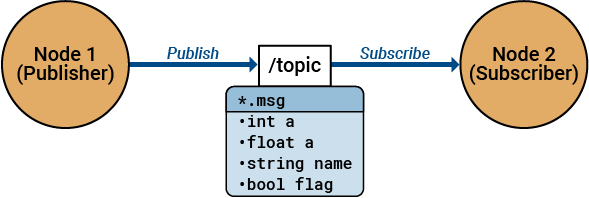
Топик в ROS представляет собой именованный канал передачи данных, через который ноды обмениваются сообщениями. Любая нода может выполнять две основные операции:
Публикация – отправка сообщений в любой топик
Подписка – получение сообщений из произвольного топика
Каждый топик должен иметь строго определённый тип передаваемых сообщений. ROS предоставляет обширную библиотеку стандартных типов сообщений, охватывающих различные робототехнические задачи, а также поддерживает создание пользовательских типов данных.
Примеры стандартных типов сообщений:
| Тип сообщения | Описание |
|---|---|
std_msgs/Int64 |
Целое число. |
std_msgs/Float64 |
Число с плавающей точкой (дробное) двойной точности. |
std_msgs/String |
Строка. |
geometry_msgs/PoseStamped |
Позиция и ориентация объекта с заданной системой координат и временной меткой (широко используется для передачи текущей позиции робота и его частей). |
geometry_msgs/TwistStamped |
Линейная и угловая скорость объекта с заданной системой координат и временной меткой. |
sensor_msgs/Image |
Изображение (см. статью о работе с камерой) |
Info Смотрите остальные стандартные типы сообщений в пакетах
common_msgs,std_msgs,geometry_msgs,sensor_msgsи других.
Пример публикации сообщения типа std_msgs/String (строка) в топик /foo на языке Python:
import rospy
from std_msgs.msg import String
rospy.init_node('my_ros_node')
foo_pub = rospy.Publisher('/foo', String, queue_size=1) # создаем Publisher
foo_pub.publish(data='Hello, world!') # публикуем сообщение
Пример подписки на топик /foo:
import rospy
from std_msgs.msg import String
rospy.init_node('my_ros_node')
def foo_callback(msg):
print(msg.data)
# Подписываемся. При получении сообщения в топик /foo будет вызвана функция foo_callback.
rospy.Subscriber('/foo', String, foo_callback)
rospy.spin() # входим в бесконечный цикл, чтобы программа не завершила работу
Вы можете прочитать данные из топика однократно, используя функцию wait_for_message:
msg = rospy.wait_for_message('/foo', String, timeout=3) # ждать сообщения в топике /foo в таймаутом 3 с
Также существует возможность работы с топиками с помощью утилиты rostopic. Например, с помощью следующей команды можно просматривать сообщения, публикуемые в топик /mavros/state:
rostopic echo /mavros/state
Команда rostopic info позволяет узнать тип сообщений в топике, команда rostopic hz — частоту публикуемых в топике сообщений.
Также данные в топиках можно визуализировать и в графических инструментах ROS.
Сервисы
Основная статья: https://wiki.ros.org/Services.
Сервисы в ROS: взаимодействие по схеме "запрос-ответ"
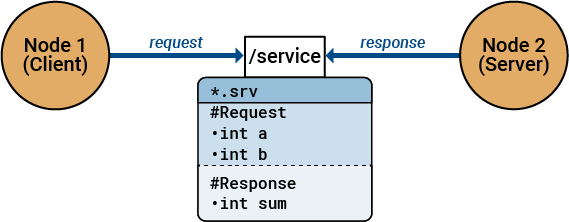
Сервис в ROS реализует механизм удаленного вызова процедур, позволяющий одной ноде инициировать операцию, которая будет выполнена в другой ноде. Каждый сервис обладает уникальным именем (аналогично топику) и использует два строго определенных типа сообщений:
тип для формирования запроса
тип для получения ответа
Такой подход организует четкое взаимодействие между компонентами системы по принципу "запрос-ответ".
Таким образом, сервисы реализуют паттерн удаленного вызова процедур
Пример вызова ROS-сервиса из языка Python:
import rospy
from technic.srv import GetTelemetry
rospy.init_node('my_ros_node')
# Создаем обертку над сервисом get_telemetry пакета clover с типом GetTelemetry:
get_telemetry = rospy.ServiceProxy('get_telemetry', srv.GetTelemetry)
# Вызываем сервис и получаем телеметрию квадрокоптера:
telemetry = get_telemetry()
С сервисами можно также работать при помощи утилиты rosservice. Так можно вызвать сервис /get_telemetry из командной строки:
rosservice call /get_telemetry "{frame_id: ''}"
Больше примеров использования сервисов для автономных полетов квадрокоптера Клевер можно посмотреть в документации ноды simple_offboard
Имена
Основная статья: https://wiki.ros.org/Names.
Именование в ROS: иерархия и области видимости
Каждый ресурс в ROS — будь то топик, сервис или параметр — однозначно определяется своим уникальным именем. Это имя имеет иерархическую структуру, где элементы разделяются символом /, что аналогично организации путей в файловой системе.
Примеры ROS-имен:
/(корневое или глобальное пространство имён)/sensors/camera/ugv/navigation/goal/controller/motor_speed
Важно отметить, что такие имена являются глобальными (подобно абсолютному пути к файлу), то есть они видны и интерпретируются одинаково для всех узлов в системе. Однако в целях повышения модульности и избежания конфликтов имён, в реальных разработках рекомендуется применять относительные или приватные имена.
Приватное имя
Каждая нода в ROS имеет собственное приватное пространство имён, которое автоматически соответствует её имени. Это позволяет изолировать ресурсы ноды и избежать конфликтов имён в системе.
Например, нода aruco_detect может создавать следующие топики в своём приватном пространстве:
/aruco_detect/markers/aruco_detect/visualization/aruco_detect/debug
Для удобства обращения к своим ресурсам нода может использовать сокращённую запись с символом ~ вместо полного указания пространства имён. Таким образом, вместо /aruco_detect/markers можно использовать:
~markers~visualization~debug
Этот синтаксис делает код более компактным и упрощает его поддержку.
Таким образом, создание топика foo в приватном пространство имен из Python будет выглядеть так:
private_foo_pub = rospy.Publisher('~foo', String, queue_size=1)
Относительное имя
Несколько нод также могут объединяться в общее пространство имен (например, при одновременной работе нескольких роботов). Для того, чтобы ссылаться на топики с учетом общего пространства имен, в названии ресурса опускается начальный символ /.
Пример создание топика foo с учетом общего пространства имен:
relative_foo_pub = rospy.Publisher('foo', String, queue_size=1)
Подсказка В общем случае всегда рекомендуется использовать приватные или относительные имена ресурсов и никогда не использовать глобальные.
Работа на нескольких машинах
Основная статья: https://wiki.ros.org/ROS/Tutorials/MultipleMachines.
Одним из ключевых преимуществ ROS является возможность распределения вычислительной нагрузки между несколькими машинами в сети. Это позволяет оптимально использовать ресурсы различного оборудования в зависимости от решаемых задач.
Примеры распределённой архитектуры:
Нода для обработки изображений и компьютерного зрения может работать на мощной стационарной рабочей станции
Нода управления дроном может выполняться на одноплатном компьютере (например, Raspberry Pi), непосредственно подключенном к полётному контроллеру
Другие узлы системы могут быть размещены на серверах или специализированных вычислительных устройствах
Такой подход обеспечивает гибкость при построении систем и позволяет эффективно использовать доступные вычислительные ресурсы.
Дополнительные материалы
- Учебник по ROS от Voltbro - http://docs.voltbro.ru/starting-ros/.
- Другие книги по ROS - https://wiki.ros.org/Books.
- Курс по ROS 2 - https://stepik.org/course/221157/promo
1. Также встречается перевод "узел". ↩